
|
|
|
|
Литература --> Бумажный брак в производстве и дна, наклоненного для сообщения вороху движения силой тяжести по направлению к решетам; для облегчения скатывания во- роха дну часто дают Фиг. За. легкое качательное движение. В стенке ковша, обращенной к решетам, делают отверстие, закрываемое заслонкой Е. Применение заслонки позволяет  Фиг. 36. регулировать размеры подачи на репюта вороха. Вентилятор, помощью которого продуваются решета, помещается в особом кожухе под ковшом. Он обыкновенно состоит из пяти, иногда четырех или шести лопастей; т. к. струя ветра д. б. равномерна, то предпочитают пять лопастей (при четырех получается прерывистая струя); увеличение числа крыльев способствует равномерности струи, но усложняет и удорожает конструкцию В. Лопасти вентилятора ставят радиально (фиг. 1), но чаще им дают наклон назад, с целью избегнуть уплотнения струи перед лопаткой и разрежения воздуха за ней. Воздух засасывается вентилятором через боковые окна (фиг. 1, jST); при полном открытии их получается наиболее сильная струя, и если она выорасывает зерна наружу, то заслонки прикрывают. Изменение плотности струи воздуха достигается или специальной заслонкой или изменением числа оборотов оси вентилятора. В ручных веялках к этому не прибегают, так как для рабочего наиболее удобным является вращение рукоятки со скоростью 40-45 об /м. (при расположении оси вентилятора на высоте \ м V. радиусе рукоятки 0,4 ле). Число оборотов вентилятора при нормальном числе оборотов рукоятки получается в существующих веялках от 120 до 150, что составляет скорость лопасти в 7,25 м/ск. В. некоторых веялках, работающих от приводов, приток воздуха автоматически регулируется установкой заслонок с противовесами, закрывающих или открывающих отверстия в кожухе или в окнах вентилятора при изменении числа оборотов его. Р е ш е- та устанавливают- I ся в рамах по не- --- . \i. 5J, сколько вместе и образуют два стана: верхний-В и нижний-С. Решетам сообщается ко-г. 4. лебательное движе- ние, при чем в одних В. решета качаются вдоль станка В., а в других-поперек. При продольном колебании ворох быстро проходит по решетам, и производительность такой В. увеличивается. При поперечном колебании ворох и зерно дольше держатся на решетах, описывая более длинный путь, вследствие чего зерно лучше очищается от примесей, но производительность В. при этом уменьшается. Решета устанавливают наклонно, и степень  Фиг. 5а. наклона их м. б. изменяема в зависимости от состояния вороха, т. е. характера зерна, степени засоренности его, влажности и т. д. Решета В. делают: 1) плетеные из железной проволоки; 2) с отверстиями, пробитыми в железном или цинковом листе, и 3) составные, из ряда железных пластинок, поставленных наклонно. От решета В. требуется, чтобы оно имело достаточно шероховатую поверхность, для задержки вороха на ветру, и имело наибольшее живое сечение, т. е. имело наименьшую площадь промежутков между отверстиями, которые задерживают ток воздуха. Этим требованиям наиболее удовлетворяет решето Вараксина, которое имеет тонкие, планки, поставленные наподобие жалюзи, а также решето Грепеля (фиг. 2). Наименее пригодным является пробивное решето. Форма отверстий решет бывает квадратная, прямоугольная ромбическая, шестиугольная и т. д.; решающего значения она не имеет, так как в В. играет роль размер отверстия решет. Решета различаются по №, по к-рым они и подбираются для различного зерна; № решета обозначает число отверстий, приходящихся на единицу его длины. При каждой В. отпускается набор решет для различного зерна. Механизм В, очень прост (фиг. За и 36): от рукоятки Р помощью одной пары зубчатых колес Zi Vi движение передается к оси вентилятора (вращательное движение); для того, чтобы преобразовать вращательное движение в качательное, для решет применяются четырехзвенные механизмы: на противоположном конце вала вентилятора насаживается кривошип в виде диска с противовесом А В, от которого при помощи шатуна В-С движе- X ние передается системе коленчатых рычагов и далее к шатуну E-F, присоединяемому к решетам. Для осуществления продоль-колонистской веял-механизмов по  Фиг. 56. ного качания решет в ке применяется система схеме фиг. За: механизм А-В-С-В и механизм D-E-F-G; для поперечного качания в веялке системы Гранта-по схеме фиг. 36: механизмы А-В-С-В, B-E-F-G и G-F-M-N. В других В., например системы Клейтона и Беккера (фиг. 4), вводятся конич. зубчатые колеса Z и Zi и механизмы: А-В-С-В и D-C-E-F, а также применяется ременная передача к нижнему решетному стану через шкив а, сидящий на оси колеса Zj. Для простоты и дешевизны в В. применяются простые плоскостные четырехшарнирные механизмы 1-2-3-4 (фиг, 5а), тогда как передача движения совершается из вертикальной плоскости (вращение рукоятки) в плоскость, имеющую наклон к горизонту, вследствие чего простые шарниры механизмов стучат и быстрее срабатываются. Необходимо ставить универсальные шарниры по схеме семи-звенного механизма: 1-2-3-4-5-6-7 (фиг. 56). ВЗАИМНАЯ ИНДУКЦИЯ Веялки разделяются по характеру движения верхнего решетного стана на: черновые, имеющие продольное движение и дающие ббльшую производительность, но меньшую чистоту работы, и беловые, менее производительные, но очищающие зерно более совершенно. Из черновых В. у нас строятся В. типа Вараксина и колонистские; беловые строятся по типу Клейтона № 5. Промежуточным типом являются веялки уфимские и тульские, которые хотя и имеют поперечное  Фиг. 6. колебание решет, но, вследствие большой ширины последних, отличаются значительной производительностью. Из иностранных машин имеют значение В. заводов бр. Рёбер (Gebr. Rober) и английские - Клейтона (Clayton & Shuttleworth). Веялки строятся различных размеров с производительностью от 400 до 800 кг в час для В. ручных и до 2 ш в час для конных. К конным В. иногда присоединяют ковшовый элеватор (фиг.6,Э), при помощи которого очищенное зерно поднимается и ссыпается в мешки. Лит.: Горячкин В. П., Веялки и сортировки, Москва, 1908; его ш е. Отчет об испытании веялок на Бутырском хуторе, М., 1900; В е й с Ю. А., Курс с.-х. машиноведения, 2 изд., М.-Л., 1927; Д е б у К. И., Очистка, обезвреживание и сортировка семян, СПБ, 1908; его же. Веялки и сортировки, СПБ, 1911; его же. Очистка зерна, Харьков, 1923; Черняев В. В., Очистка и сортировка семян, СПБ, 1890; Машины для очистки, сортировки и сушки семян, СПБ, 1397, изд. Вольцо-эконом. об-ва. Б. Крипь. ВЗАИМНАЯ ИНДУКЦИЯ, электромагнитное взаимодействие двух электрическ. цепей. Если в электрическ. цепи 1 проходит ток г, то через электрич. цепь 2, расположенную поблизости, проходит часть Mix магнитного потока, создаваемого током ix в цени 1. Коэффициент М называется к о э ф ф-т о м взаимной индукции, или взаимной индуктивностью (см.Индуктивность). При прохождении в цепи 2 тока i в цепи 1 создается магнитный поток Mi с тем же значением коэффициента М. Если в цепи 1 изменяется ток г, то в цепи 2 появляется (индуктируется) напряжение ./р если в цепи 2 изменяется ток ij, то в цепи 1 индук- тируется напряжение Ж . См. Индукции закон и Связь. я. Шпильрейн. ВЗАИМНОСТЬ ДВИЖЕНИЙ. Всякое движение относительно. При исследовании относительного движения двух неизменяемых систем А я В (напр. двух твердых тел) за неподвижную систему сравнения можно принимать условно систему А или систему В. Если дано движение системы А по отношению к системе В, условно принятой за неподвижную, то каждая точка а системы А при своем движении будет последовательно совпадать с некоторыми определенными точками системы В; совокупность этих точек образует траектории (см.) s точек а по отношению к системе сравнения В. Относительное движение обеих систем не изменится, если той среде, в которой находятся обе системы А я В, сообщить движение по закону движения системы А, но направленное в каждый момент в сторону, обратную данному движению системы А. При таком условии все перемещения точек системы А будут противоположны ее данным перемещениям, и систему А в пространстве можно будет принять за неподвижную систему сравнения; при этом каждая точка Ъ движущейся системы В будет последовательно совпадать с некоторыми онределенными точками системы А, и совокунмость этих точек образует траектории о для точек Ъ по отношению к системе сравнения А. Если данное движение системы А относительно системы сравнения В назовем прямым, то движение системы В относительно системы сравнения А будет называться обращенным движением, а данное и обращенное движения вместе носят название взаимных движений. Какое из этих движений считать прямым и какое обращенным-всецело зависит от нашего выбора; так, напр., если вращение маховика относительно паровой машины мы примем за прямое движение, то обращенным движением будет вращение всей паровой машины относительно маховика как неподвижной системы сравнения. Идея В. д., т. е. существования для каждого данного движения соответствующего обращенного движения в зависимости от того или иного выбора системы сравнения, была в общем виде указана Шалем (Chasles), и это положение носит название принципа Шаля. Этот принцип играет большую роль в теории механизмов (см.). Лит.: Кинематич. отделы различных курсов по теоретич. механике (Бобылев Д., Сомов П., Суслов г. и другие); С h а s 1 е s М., AperQu hislo-rique sur Iorigine et le developpement des methodes en geometric, particulierement des celles qui se rap-portent a la geometric moderne, P., 1889; Schell W., Theorie d. Bewegung u. d. Krafte, B. 1, Lpz., 1879; Reuleaux F., Theoretische Kinematik, Braunschweig, B. 1, 1875, B. 2, 1900. A. Яшнов. ВЗАИМНОСТЬ ПЕРЕМЕЩЕНИЙ. Это положение было доказано Бетти (Е. Betti) в 1872 г. Оно имеет вид: И формулируется так: если какая-либо система находится последовательно под действием нагрузок Sn (1-е состояние) и нагрузок Sfn (2-е состояние) или наоборот, то возможная работа сил первого состояния (Sn) на перемещениях rf вызываемых силами второго состояния [Sfn) по направлениям первых, равна возможной работе сил второго состояния (S) на перемещениях вызываемых силами первого состояния (S) по направлениям сил второго состояния . Напр., если на ферму (фиг. 1) действует сила Р , вызывающая изменение наклона раскоса В к горизонту на величину А(р п (1-е состояние), и затем подействует пара сил с моментом М , вызывающая перемещение узла и на 1-е состояние  Фиг. 1. величину f, (2-е состояние), то, но смыслу теоремы Бетти, можно написать: Pnfnm~mmn Это положение имеет большое применение в расчетах статически неопределимых систем; оно облегчает написание уравнений, недостаюш;их для расчета этих систем. Наприм., если рассматривать арку, заделанную пятами (фиг. 2), представляющую собой трижды статически неопределимую систему, то, приведя эту арку к виду статически определимого кривого бруса с при.710женными к нему неизвестными На, Va И Ж , можно рассматривать этот брус в следующих четырех состояниях загр ужения: 1-е, действительное состояние: нагрузки: Р, На, Va, Ma, деформации: Ах=0, Ау=0, А<р=0; 2-е, воображаемое состояние: перемещения: Sph, нн, vh, мн; нагрузка: 1 - - ; 3-е, воображаемое состояние: перемещения: dpv, hv, vv, mv, нагрузка: - 1 - ; 4-е, воображаемое состояние: перемещения: брм, нм,vm, мм; нагрузка: - - 1. Это дает возможность составить следующие уравнения: psph+Hhh + VjvH +MJmh=\- Ах=0; Pdpv +HaSHV -Ь VJvv +MJmv =1 AyO; P6PM+Hhm -f F/y m+MJm m=1-A<p0. Далее остается упрощение этих уравнений, вычисление величины 6 в них и решение их относительно неизвестных На, Va и Ма- Частный случай теоремы о В. п. был доказан еще в 1864 г. Максвелом (С. Maxwell), к-рый показа.т, что т Это положение формулируется так: если на систему действуют две количественно равные нагрузки, то перемещение (<5 ), вызываемое действием второй нагрузки (ш) по направлению первой fl (п), количественно равно перемещению, вызываемому действием первой нагрузки (п) по нацра-влению второй (m) . Напр., если на балку гействует сила Р = С кз и момент М = С кгм 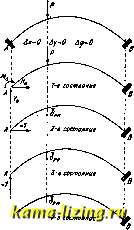 Фиг. 2. (фиг. 3), то прогиб / , , вызываемый моментом Mm по направлению силы Р , будет равен углу поворота q), вызываемому действием силы Р по направлению момента М, т. е. fnm=V>mn- Эта зависимость позволяет заменять сложное по вычислению перемещение rf более простым по вычислению перемещением Кроме того эта зависимость позволила перейти от эпюр перемещений и линий прогибов к линиям вли- Фиг. 3. яния в статически неопределимых системах. Напр ., если бы для двухшар-нирной арки, пред ставляющей собой однажды - статически неопределимую систему, требовалось построить линию влияния распора Н, то это построение может быть сделано на основании следующих соображений. Приведя арку к виду статически определимого кривого бруса, лежа:щего на двух опорах (фиг. 4), строим для него эпюру перемещений, как веревочную кривую апЪ для упругих грузов W. Каждая ордината этой кривой определяет собой величину вертикального перемещения брн любой точки п оси арки. Так как, по теореме о взаимности перемещений, брн =бнр, то, следовательно, ординаты той же кривой определяют собой величины перемещения точки приложения силы Н от действия силы Р=1, приложенной в точке п оси арки, и так как эти ординаты из-  Фиг. 4. меняются в зависимости от положения груза Р = 1, то, следовательно, кривая апЬ представляет собою линию влияния перемещения точки А по направлению силы На. Рассмотрим зависимость между нагрузками Р=1 я На в условиях 1-ГО И 2-ГО состояний: 1-е, действительное состояние: Р=1, На] Ах=0 2-е воображаемое состояние: К брн, бнн) 1, откуда Рбрн+Нбнн=0 или Из этого следует, что кривая atib с ординатами брн может бьггь рассматриваема как линия влияния неизвестной силы Нд при условии измерения этих ординат в масштабе 6jjjj.Cu, Линии влияния. Лит.: ПрокофьевИ.П., Теория сооружений, ч. II, М., 1928; Тимошенко СП., Курс сопротивления материалов. Работа внутренних сил упругости, 5 изд., М.-П., 1923; Филоненк о-Б о р од и ч М, М., Основы теории работы упругих сил в
|