
|
|
|
|
Литература --> Изомерия в производственном цикле составляющую реактивного тока Ji ., к-рая или совпадает с намагничивающим током (фиг. 42) или сдвинута относительно него на 180° (фиг. 43), В первом случае намагничивающий ток, доставляемый первичной цепью, уменьшается, а cos ср двигателя улучшается, во втором же случае cos (р ухудшается. б) Фазовые компенсаторы или возбудители асинхронного двигателя. Добавочная эдс, сдвинутая от основной на 90 электрич. градусов, м. б. 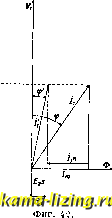 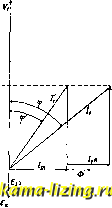 Фиг. 4 3. получена в системах, подобных применяемым для регулировки скорости, с помощью соответствующей регулировки сдвига фаз между этими эдс. Так как эта добавочная эдс должна преодолевать практически лишь активное сопротивление вторичной цепи двигателя, вызывая в ней необходимую намагничивающую мдс, то эта добавочная эдс может быть создана в весьма малой по своим размерам машине. Т. о., преобразователь частоты и коллекторные машины по системе Кожисека и Шербиуса м, б. использованы в 1сачестве возбудителей или т. н. фазовых компенсаторов для асинхронных двигателей. Т. к. при этих применениях вьппе- - описанных систем отсутствует НРОбХОДИ-  itth Фиг. 44. Фиг. 45. мость В получении регулировки скорости, то системы эти в своем выполнении получаются значительно проще, будучи предназначены только для режима работы при рдной скорости. Изменение нагрузки в этом случае не вызывает необходимости в дополнительной регулировке. На фиг. 44 представлена схема SSW, выполняемая по системе Кожисека, а на фиг. 45-схема с шунтовым фазовым т. э, т. IX. 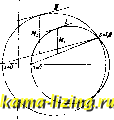 Фиг. 46. компенсатором, выполняемая фирмой ВВС по системе Шербиуса. Эти системы дают возможность асинхронному двигателю работать по круговой диаграмме с увеличенным диаметром. Благодаря этому, вместе с улучшением cos q) одновременно достигается и увеличение перегрузочной способности двигателя, что в нек-рых случаях (напр. при прокатных станах) может иметь особо ваншое значение. На фиг. 46 представлены круговая диаграмма I - для асинхронного двигателя без компенсатора и диаграмма J7 -при наличии шунтового компенсатора Шербиуса с отмеченными на них величинами опрокидьшающих моментов Mi и М. Фазовые компенсаторы по системе периодо-преобразователя и системе Кожисека являются механ1шески связанными с валом главного двигателя посредством соединительной муфты в случае равенства чисел полюсов двигателя и компенсатора и посредством зубчатой передачи, если числа полюсов этих машин не равны. Шунтовой компенсатор не имеет необходимости в механической связи с валом главного двигателя и мон-сет быть приводим в движение отдельным небольшим двигателем любой системы, что дает этому компенсатору значительное преимущество перед двумя первыми. в) Фазовый компенсатор системы Л е б л а и а-Ш е р б и у с а. Особый интерес по своей простоте и дешевизне пред-: ставляет фазовый компенсатор Леблана-Шер-биуса, который может применяться только в. схемах для улучшения сов (р. Этот компенсатор имеет якорь с обмоткой, соединенной с коллектором, щетки которого соединяются с кольцами асинхронного двигателя. В системе Леблана статор компенсатора не имеет обмотки и слу-исит лишь магнитопроводом для поля якоря, а при системе Шербиуса статор заменен железным кольцом, насаженньш на якорь и вращающимся вместе с ним. Компенсатор К приводится во вращение небольшим двигателем М, скорость которого не связана со скоростью главного двигателя А (фиг. 47). При холостом ходе главного двигателя А компенсатор К не оказывает никакого действия на его работу и служит для замыкания вторичной цепи, играя в ней роль лишь нек-рого добавочного сопротивления. При нагрузке двигателя А его вторичный ток проходит через якорь компенсатора и создает вокруг него магнитное поле, медленно вращающееся в пространстве соответственно с частотой вторичной цепи /з-Если компенсатор неподвижен, то его эдс самоиндукции отстает на 90° по фазе от тока. Если якорь компенсатора вращается в Фиг. 47. направлении вращения поля, то при синхронной скорости вращения эдс компенсатора равна нулю. Если вращать якорь компенсатора выше синхронной скорости, то эдс компенсатора изменяет свой знак на 180° и поэтому опережает ток по фазе на 90°. Благодаря этому вторичный ток двигателя начинает опережать его основную эдс, и двигатель улучшает свой cos 9?. На фиг. 48,а представлена приближенная диаграмма асинхронного двигателя без компенсатора. Т. к. частота /2 очень мала, то можно считать, что ток Jg совпадает по фазе с создающей его эдс, и потому sBaJaa-Первичный ток 1 равен геометрическ. сумме приведенного вторичного тока 1 и намагничивающего тока 1, поэтому ток Ji отстает по фазе от напряжения Fj \ на угол 9?. На фиг. 48,6 представлена диаграмма при наличии компенсатора для случая, когда добавочное на- фиг. 48. пряжение позволяет получить полную компенсацию двигателя до cos9? = l. В этом случае ток 1 опережает эдс sE на тот же угол 99 и создается геометрич. суммой эдс sE и Sjt , поэтому при неизменном вращающем моменте,согласно ф-ле (22),величина вторнч-цого тока должна измениться и будет равна I - Величина основной эдс двигателя откуда s= COS <р COS 4} cos я> cos* <p Напряжение компенсатора Ej, = s Ea sin 9? = i-. tg <p. COS<p Мощность одной фазы компенсатора = EJ,- Т.к. можно считать, что мощность двигателя на фазу равна то при компенсации cos гр со стороны ротора KVA,==KVA,..tgV. На фиг. 49 представлена круговая диаграмма А двигателя без компенсатора, В- круговая диаграмма с ненасыщенным компенсатором, дающим cos 97 = 1 при полной нагрузке, и С-уплощенная диаграмма конца вектора первичного тока двигателя, дающего также cos 93 = 1 при полной нагрузке. В последнем случае улучшение cos 95 начинает наступать при меньших нагрузках, чем в случае ненасыщенного компенсатора. В обоих случаях кривая тока проходит выше, чем в круговой диаграмме А без компенсатора, поэтому наличие компенсатора повы- шает перегрузочную способность двигателя. На фиг. 50 представлены кривые cos 99 двигателя при изменении нагрузки: кривая А- прл отсутствии компенсатора, а кривая В- при наличии компенсатора. 13. Однофазный асинхронный двигатель, а) Принцип действия. Однофазный асинхронный двигатель имеет пульсирую- щую мдс, к-рая м. б. разложена на две мдс, вращающиеся в противоположные стороны и имеющие равные амплитуды. Поэтому однофазная обмотка м.. б. заменена двумя другими, питаемыми трехфазным током и соединенными т. о., что одна дает поле, вращающееся в одном направлении, а другая-в противоположном. При неподвижном двигателе обе мдс действуют на ротор одинаковым образом, создавая в нем вращающие моменты, направленные в противоположные стороны и взаимно уравновешивающиеся. Если привести ротор во вращение в одну сторону, то мдс, действующая в эту же сторону, cose  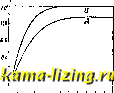 Фиг. 49. гЩО,г 0,4 0,6 0,3 1,0 1,2 Фиг. 50. создает в нем ток с частотой sf и образует момент Ml, который действует в направлении вращения ротора. Другая обмотка будет иметь мдс, действующую против направления вращения ротора и создающую в нем режим тормоза. Ток от этой обмотки будет иметь частоту (2-s)/i, которая образует момент Ма, действующий против направления вращения ротора. На фиг. 51 представлены кривые вращающих моментов Mj и Mg, построенные для скольжений от s=0 до .s=2 относительно поля первой обмотки. Из этих кривых видно, что при 5=1,0 оба момента уравновешивают друг друга; если же двигатель вращается в какую-либо сторону, то момент, увлекающий ротор в этом направлении, превышает обратный момент. При замкнутом роторе намагничивающий ток однофазного двигателя почти вдвое больше, чем при разомкнутом; поэтому cos 9?
Фиг. 5 1. Zfls Фиг. 52. однофазного двигателя нине, чем трехфазного. Т. к. обратное Поле создает обратный момент и вызывает добавочные потери в роторе, то кпд однофазного двигателя такнсе меньше, чем трехфазного. б) Пуск в ход однофазного двигателя, Т, к, однофазный двигатель не развивает начального момента, то для пуска его в ход применяется вспомогательная пусковая обмотка, сдвинутая в пространстве относительно основной на 90°, Для получения сдвига токов во времени в обеих обмотках, в главную обмотку Р включается при пуске омич. сопротивление Д, а во вспомогательную М-самоиндукция х (фиг, 52), Т, к. обе обмотки сдвинуты в пространстве на 90°, а токи в них сдвинуты на угол, меньший 90°, то в результате образуется эллиптическое вращающееся поле, создающее вращающий момент в направлении его движения. При пуске рубильник <S ставится в верхнее положение, а при работе-в нижнее, обозначенное пунктиром. Однофазный двигатель имеет также круговую диаграмму, дающую возможность Получать его характеристики. Однофазные двигатели получаются заводским путем из моделей трехфазных, при чем / пазов заполнены основной обмоткой и 1/з - пусковой. Поэтому тип однофазного двигателя позволяет получать из данной модели приблизительно мощности трехфазного. 14. Трёхфазный асинхронный двигатель как катушка самоиндукции. Если соединить статор и ротор трехфазного двигателя т. о., чтобы поля их вращались в одном направ.че-нии, то при повороте ротора и закреплении его в неподвижном положении получается симметричная регулируемая катушка самоиндукции (фиг. 53). Результирующее чис.о витков такой катушки будет равно W = IXiVjkj) + {wh + IWikwjk cos a , где w-JCi - действующее число витков статора, Wg/Cg - число витков ротора и а - угол  Фиг. 53. Фиг. 54. сдвига между соответствующими осями катушек (фиг. 54). Магнитный поток Ф такой катушки самоиндукции будет прибли- зительно равен И будет изменяться вместе с углом а. Соответственно будет изменяться и намагничивающий ток, создающий поток Ф; поэтому такая катушка будет потреблять различный реактивный ток, при изменении к-рого будут одновременно изменяться и поля рассеяния статора и ротора. При а=0° система будет иметь наибольшее реактивное результирующее сопротивление   и потому будет потреблять наименьший реактивный ток. При а = 180°, наоборот, система будет иметь наименьшее реактивное сопротивление и соответственно будет потреб- .пять наибольший реактивный ток. Описанный выше тип трехфазной катушки самоиндукции особенно распространен в лабораторной практике. 15. Потенциальный регулятор. Если присоединить статор асинхронного двигателя к одной сети, а ротор-к другой, то при повороте ротора и закреплении его в неподвижном положенрш можно создавать любой сдвиг фазы эдс ротора относительно эдс статора (фиг. 55), благодаря чему двигатель превращается в трансформатор фазы. Если присоединить обмотку статора или ротора к сети, а три фазы обмотки, помещенной на другой части машины, соединить последовательно с фазами первой, то получится схема потенциального регулятора (фиг. 56). Первая обмотка Wx создает в машине вращающееся магнитное поле, которое индуктирует во второй обмотке добавочное напряжение Ez, геометрически складывающееся с напряжением первой* обмотки Е\. Т. о. можно получить максимальное напряжение = = .Bi-b£f2 и минимальное Е = Ех - е. Если обмотка Wg сдвинута от оси обмотки и\ на угол а, отличный от О и 180°, то результирующее напряжение Е, получится как геометрическая сумма напряжений Е и Е: Еп=Ех + Ez . Потенциальный регулятор рассчитывается на отдаваемую им кажущуюся мощность: тгтг А Г Em/ix ~ Enrin У 2-10 Так же, как в трехфазном асинхронном двигателе, в потенциальном регуляторе получается нек-рый вращающий момент, соответствующий мощности, к-рая передается из первичной цепи во вторичную. Для уничтожения момента на валу регулятора, а также сдвига по фазе между первичным и вторичным напряжением применяется сдвоенный потенциальный регулятор по схеме фиг, 57. В этом регуляторе при всех угловых положениях ротора эдс Ех и Е практически совпадают по фазе, а т. к. моменты обеих частей направлены навстречу, то в этом случае отсутствует общрш момент на валу. Регулятор фаз применяется в лабораториях для проверки приборов при различных cos 97 и в каскадных установках для добавочного поворота фазы коллекторной машины, напр. в схеме Кожисека, Потенциальный регулятор применяется для регулирования напряжения у приемников в сетях с большим колебанием напряжения. 16. Асинхронная машина двойного питания. Асинхронная машина, у к-рой статор и ротор выполнены с одинаковым числом витков, м, б. обращена в синхронную. Для этого фазы статора и ротора соединяют в обратном порядке так, чтобы при неподвижном роторе поля статора и ротора вращались в противоположи, направлениях. Если при помощи внешн. силы довести ротор до двойной  Фиг. 5
|