
|
|
|
|
Литература --> Водородные ионы в производстве ВОЛХОВСКАЯ ГИДРОЭЛЕКТРИЧЕСКАЯ СТАНЦИЯ  1!1Л на liOjiocifiiiiiyK) плоглну и i.iaimc сшицип.  Т. Э, Перспектива судоходного шлюза. чение шлюзования реки в данное время незначительно. Однако в будущем экономические последствия шлюзования реки окажутся весьма благоприятными для всего края. Затраты по устройству В. г. с. исчисляются в 97 500 ООО руб., не считая % на капитал за время постройки; при этом не учтены оставшееся от работы имущество, равно как и размеры затрат, ложащихся исключительно на улучшение судоходных условий реки. Лит.: Как строится Волховская гидроэлектрич. станция , Бюллетень 1-3, Л., 1924-25 (в дальнейш., с 4 1925 - до 11 1927, под назв. Бюллетень Волховской гидроэлектрич. силовой установки ), Анисимов. ВОЛЧОК, в широком смысле слова-твердое тело произвольной формы, которое мо- жет вращаться около точки опоры с любой скоростью (точка опоры м. б. в состоянии покоя или прямолинейного и равномерного движения). Волчком, в узком смысле слова, или жироскопом, называется твердое тело, вращающееся с большой угловой скоростью вокруг некоторой оси, изменяющей в общем свое положение как в пространстве, так и в самом теле. Обычно жироскоп представляет собою однородное тело вращения, ц. т. которого находится на геометрич. оси; чаще всего он имеет вид плоского диска с утолщенными краями, ось вращения к-рого нормальна к его плоскости. Из всех внешних сил, действуюпщх на волчок, самой существенной является сила тяжести. Если на В. кроме силы тяжести никакие другие силы не действуют, то он называется свободным или тяжелым, в зависимости от того, совпадает ли точка опоры с ц. т. или нет. Если же на В. действуют еще и другие внешние силы, то могут представиться двоякого рода проблемы: или при данных действующих силах требуется определить характер движения В. или при данном вынужденном движении В. определить действие его на связи. Поэтому главным вопросом в теории В. является установление соотношений между внешними силами, дей-ствуюпщми на В., изменением положения его оси в пространстве и в теле и развивающимися при этом силами инерции. В основе теории волчка лежат следующие теоремы динамики. Пусть -радиус-вектор точки приложения силы Ff, имеющий начало в ц. т. тела, -скорость движения точки,Ж = 2 t*** - равнодействующий 1=1 момент всех сил относительно ц. т. и в -момент количества движения тела относительно той же точки (см. Момент количества движения). Тогда имеем: = Ш, т. е. производная по времени от вектора равнодействующего момента количества движения тела равняется по величине и направлению вектору равнодействующего момента всех сил, действующих на тело. Пусть далее Т-кинетич. энергия движения тела, (О-вектор мгновенной угловой скорости вращения Te.7ia, Тогда: T=j{J), (2) т. е. кинетич. энергия движения тела равняется в канедый момент половине скалярного произведения (см. Векторное исчисление) вектора момента количества движения тела на вектор мгновенной угловой скорости. В частности, если М = 0 (что имеет место, напр., у свободного волчка), то из (1) видно, что в = Const, т. е. что в этом случае момент количества движения тела не меняет ни своей величины ни своего направления в пространстве. Если кинетическая энергия Т остается постоянной, например у свободного В., то проекция <о на направление в постоянна. При помощи т. н, эллипсоида Пуан-со (Poinsot) представляется возможным по данному вектору в определить вектор (о и наоборот. При движении В. следует различать: мгновенную ось вращения, ось, по к-рой направлен в данный момент вектор О, и ось симметрии В. (если В. симметричный), В частности, движение свободн. симметричного В. состоит из равномерного вращательного движения тела вокруг оси симметрии, 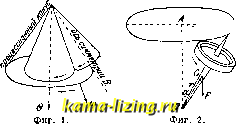 описывающей с некоторою постоянною скоростью круглую конич. поверхность вокруг оси постоянного направления, совпадающей с направлением вектора 9, при чем оба вращательные движения совершаются в одну и ту же сторону. Движение оси симметрии В. называется прецессией. Можно это сложное движение тела представить как качение без трения одного подвижного круглого конуса по другому круглому же, но неподвижному конусу, при чем общая образующая дает направление мгновенной оси вращения тела в данный момент, ось неподвижного конуса совпадает с направлением в, а ось подвижного конуса-с осью симметрии волчка (фиг. 1). Прецессион. движение объясняется следующим обр.: если В. вращается с большой угловой скоростью вокруг оси симметрии, то вектор момента количества движения 6 совпадает с направлением этой оси. Пусть О-неподвижная точка опоры; G-центр тяжести В.; r=OG-радиус-вектор точки G, F-вес В. (фиг. 2); при отсутствии вращательного движения волчок под действием опрокидывающего момента силы тяжести, равного IrFIM и перпендикулярного к плоскости ОСА, опрокинулся бы. Но при быстром вращательном движении вектор б, совпадая с осью В., перпендикулярен к М, так что (вЖ )=0, следовательно, имеем, принимая во внимание закон (1): 2(ejlf) = 2(0 f) = = O; eConst. Пусть далее ОС = 6, - соответствующий единичный вектор и V/.-скорость точки С. Тогда имеем: dt dt Т. е. направление совпадает с направлением вектора который перпендикулярен вектору е. Отсюда следует, что вектор Vg постоянен по абсолютной величине и перпендикулярен к плоскости ОАО, т. е. точка С равномерно вращается вокруг точки А, а ось ОС вокруг оси OA. Угловая скорость этого вращательного движения £i назьшается скоростьюпрецессии. Она определяется следующим образом: так как v=[OC] = ё] = = Ж = [rF], то в = rF, откуда = Т, о. получается поразительное на первый взгляд явление, что В. под влиянием силы тяжести не падает, а совершает вращат. движение. В действительности вначале В. начинает падать, но вступает в силу закон (1), заставляюпщй конец вектора в, а вместе с ним и ось В. перемещаться по направлению, параллельному моменту силы тяжести М, т. е. в горизонтальном направлении. Если прецессионный угол а = АОС сохраняет одну и ту же величину, то прецессия называется точной. Точная прецессия бывает лишь при определенных начальных условиях движения. Обычно же описанное выше движение оси сопровождается небольшими периодич. изменениями ггрецессион. угла; последнее движение назьшается нутацией. Если какие-либо внешние силы стремятся повернуть ось В., то появляются т. н. жиро-скопические силы, являющиеся результатом сопротивления этим изменениям со стороны развивающихся сил инерции В. В технике В. встречаетсядовольно часто. Во всех тех случаях, когда имеются быстро вращаюпщеся части, мы имеем дело в сущности с В.; таковы, например, электромоторы, водяные и паровые турбины и т. п. Волчок применяют для приведения неустойчивых систем в состояние устойчивого равновесия или для улучшения уже существующего равновесия, т. е. для стабилизации системы. Если В. составляет при этом существенную часть массы всей системы, то он называется непосредственным стабилизатором; если же волчок служит лишь для указания степени отклонения системы от определенного направления, то он называется посредственным ст.а-билизатором. Самый простой способ непосредственной стабилизации тела заключается в быстром вращательном движении самого тела; часто, однако, представляется возможным стабилизировать тело посредством связанного с ним В. Стабилизаторы применяют также для уменьшения нежелательных колебаний тела. При посредственной стабилизации В. действует на стрелку указателя или на электрич. ток либо изменяет определенное давление. Волчки можно подразделить на три вида: 1) астатические В., у которых точка опоры совпадает с ц. т. и ось занимает неизменное положение в звездном пространстве вследствие того, что В. непосредственному действию силы тяжести не подвергается; 2) компасные В., у которых ось приведена в соответствие с горизонтальной плоскостью, и 3) маятниковые В., у которых ось в покое направлена по вертикали. В 1852 г. Л. Фуко (L. Foucault) и почти одновременно с ним Персон (Person) пытались, пользуясь свойствами астатич. В., доказать вращение земли. Если предположить осуществимым симметричный волчок, расположенный в невесомом подвесе, движущийся без трения и опирающийся точно в ц. т., то такой В. будет описывать точную прецессию; если же к этому ось симметрии волчка совпадает с направлением момента количества движения 6, то эта ось остается неизменно направленной в пространстве. Суточное движение земли должно было бы при этом проявиться в виде некоторого вращения вышеупомянутой оси по отношению к наблюдателю. Трудности осуществления жироскопа Фуко заключаются, с одной Фиг. 3. стороны, в необходимости точного совпадения ц. т. с точкой опоры, так как малейшее несовпадение этих двух точек вызывает нутационное движение, искажающее результаты опыта, с другой стороны - в устранении сил трения. Опыт Фуко вполне удался лишь впоследствии Ф. Жильберу (Ph. Gilbert) и А. Фёпплю (А. Foppl) при помощи изобретенных ими приборов. В жироскопе применяется так наз. карданов подвес (фиг. 3), в котором ось В. укреплена внутри кольца в направлении диаметра последнего; кольцо укреплено внутри другого кольца так, что оно может вращаться вокруг диаметра, перпендикулярного к первому диаметру; в свою очередь, последнее колесо укреплено в штативе так, что оно может вращаться вокруг оси, перпендикулярной к двум предшествующим осям вращения. Идеи жироскопа Фуко были положены Обри в основу прибора для регулирования движения мин (в 1898 г.). В задней части мины имеется жироскоп (фиг. 4), укрепленный посредством карданова подвеса и приводимый в момент выстрела в быстрое вращательное движение (до 10 ООО об/м.). Ось жироскопа горизонтальна и, оставаясь постоянной, сохраняет направление выстрела. Внешнее кольцо подвеса \ снабжено штифтом d, находящимся внутри вилочки f. Как f, так и 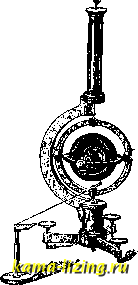
|